

Ziel des Projektes war die Entwicklung einer Multifunktionsschnittstelle zwischen dem mechatronischen Kameraführungssystem SoloAssist und einem „Single-Port“-System für die minimal-invasive Chirurgie .
Der Einsatzbereich der minimal-invasiven Chirurgie kann durch neue mechatronische Assistenzsysteme deutlich erweitert werden. Die bisher entwickelten Manipulatorsysteme genügen jedoch nicht den Anforderungen im Bereich Systemhardware, Instrumente und Schnittstellen. Das volle Potenzial der minimal-invasiven Chirurgie ist nur zu erschließen, wenn „intelligente“, flexible Manipulatoren und Instrumente zu leistungsfähigen Assistenzsystemen verknüpft werden. Hier sind neue Ansätze der mechatronischen Supportplattformen – wie das HVSPS der TU München – notwendig, um ubiquitäre „Single-Port“-Operationen zu ermöglichen.
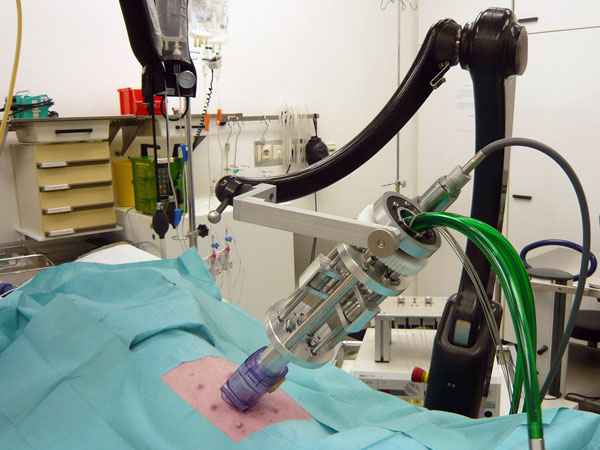
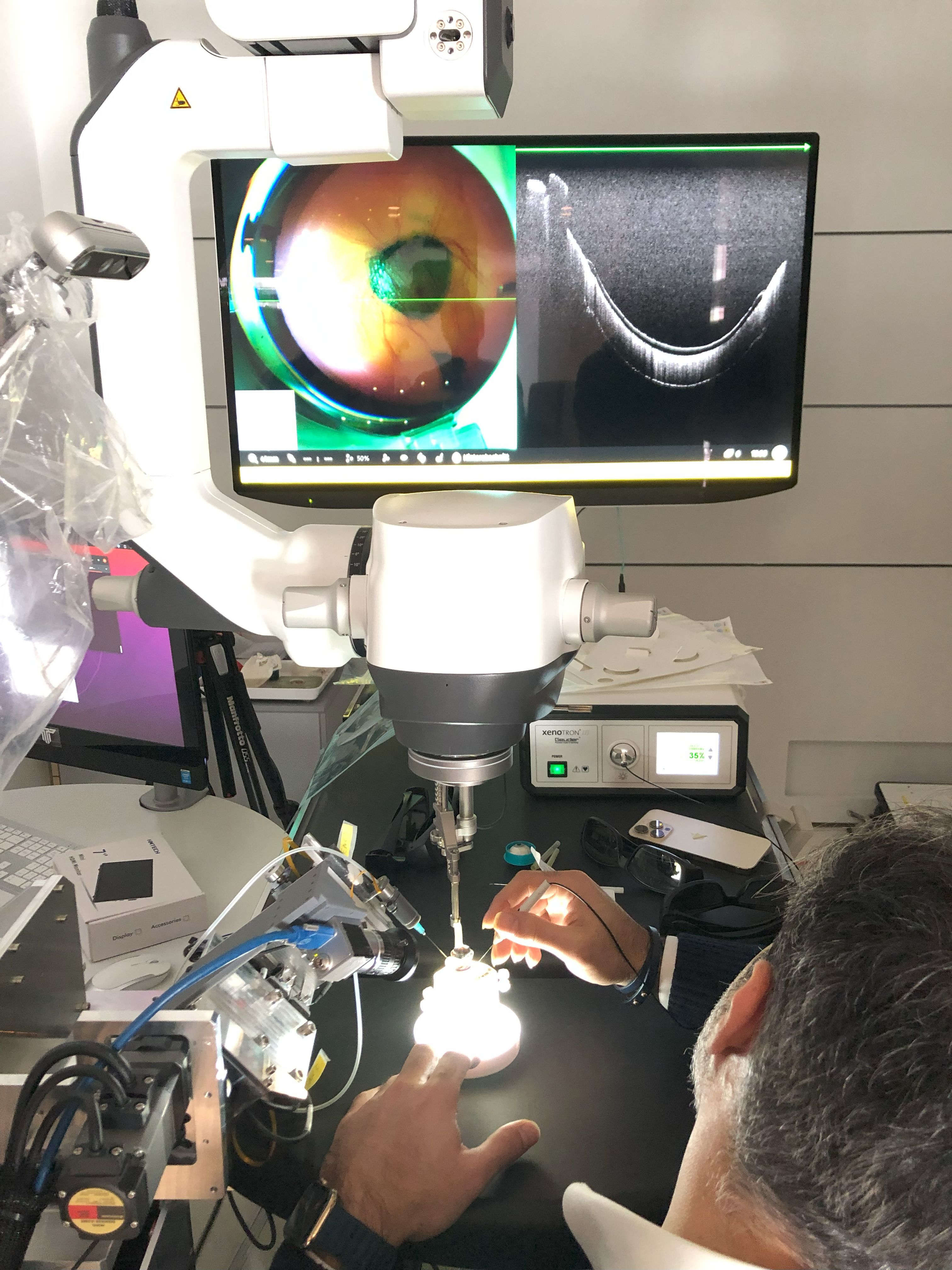
rechts: In-vivo-Evaluation des SoloAssists (Aktormed, Barbing) mit dem „Single-Port“-System im Tierversuch
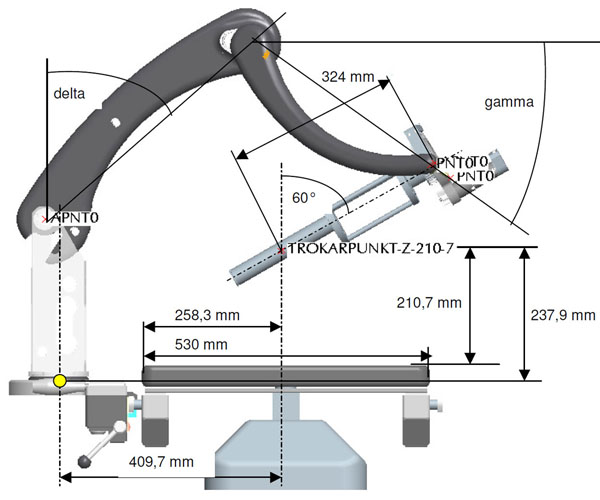
In diesem Projekt wurde untersucht, ob das mechatronische Kameraführungssystem SoloAssist prinzipiell dazu geeignet ist, statt eines Teleskops ein multifunktionales Manipulatorsystem zu tragen und zu führen. Theoretisch wäre der SoloAssist ideal als Trägersystem für die Plattform geeignet, allerdings reicht eine passive mechanische Ankopplung dafür nicht aus. An der Schnittstelle wurde daher ein Rotationsfreiheitsgrad integriert, womit alle vier Freiheitsgrade der Plattform angesteuert werden. Die Rotation wird in der Peripherie, zwei Meter vom Patient entfernt, mittels eines Elektromotors über eine biegsame Welle betätigt. Durch den integrierten Schnellverschluss wird eine einfache und schnelle Abkopplung ermöglicht.
Das Gesamtsystem mit der neuen Schnittstelle wurde erst an dem ELITE-Phantom und anschließend im Tierversuch evaluiert. Der SoloAssist konnte ohne Probleme das 3,4 kg schwere „Single-Port“-System tragen und führen. Der Arbeitsbereich von ± 170 ° und eine Geschwindigkeit von 80 °/s haben sich bei den Evaluationen als ausreichend erwiesen. Eine Positionsgenauigkeit von 9 °, die zum größten Teil aus der Torsion der Biegewelle resultiert, kann durch die Optimierung der Hardware und eine geeignete Regelung verbessert werden.