

Im Projekt wurden neuartige Steuerungskonzepte für die Lasermaterialbearbeitung mit Industrierobotern und mobilen Laserscannern entwickelt. Durch die koordinierte Ansteuerung von Roboter und mitgeführtem Laserscanner lassen sich deutlich höhere Geschwindigkeiten und eine verbesserte Genauigkeit erzielen.
Die robotergeführte Lasermaterialbearbeitung hat sich in vielen Bereichen der Industrie etabliert. Sie ermöglicht das detailgenaue Schneiden, Markieren und Schweißen von Werkstücken unterschiedlichster Materialien. Mit der Entwicklung von immer leistungsfähigeren Laserstrahlquellen wird die erzielbare Geschwindigkeit bei der robotergeführten Lasermaterialbearbeitung zunehmend durch die mechanische Trägheit des Roboters begrenzt. Insbesondere bei abrupten Richtungs- und Geschwindigkeitsänderungen kann die von modernen Laserquellen zur Verfügung gestellte Leistung oftmals nicht vollständig ausgeschöpft werden, da die Dynamik des Robotersystems nicht ausreicht, um den Laserstrahl mit der entsprechenden Geschwindigkeit über das zu bearbeitende Werkstück zu bewegen.
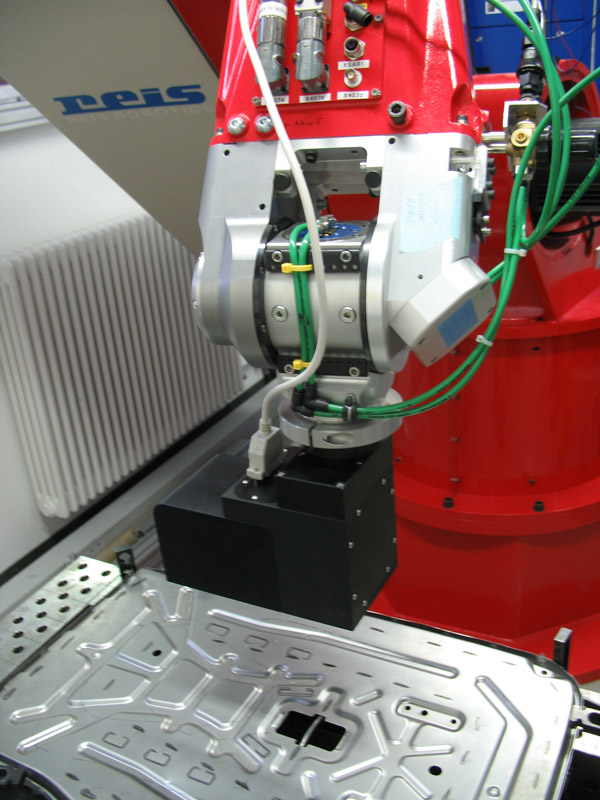
rechts: Praxistest an der Hochschule Aschaffenburg: schnelle und präzise Lasermaterialbearbeitung mit Industrieroboter und mitgeführtem Laserscanner
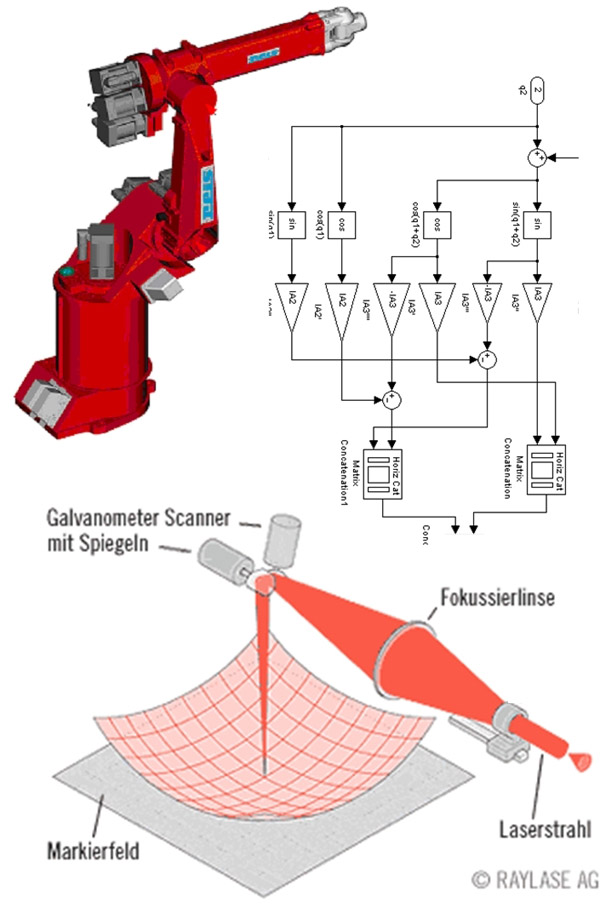
Ziel des auf zweieinhalb Jahre angelegten Forschungsprojektes LARISSA war daher die Entwicklung und Erprobung neuartiger Steuerungs- und Regelungskonzepte, die die Dynamik eines beweglichen Laserscanners mit dem großen Arbeitsraum eines Industrieroboters kombinieren. Bei dem entwickelten System wird der Laserstrahl durch eine vom Roboterarm mitgeführte Scannereinheit gezielt so abgelenkt, dass der Roboter nur relativ langsame und glatte Bewegungen ausführen muss und der Laserpunkt trotzdem schnell und präzise der vorgegebenen Bearbeitungskontur folgt. So lassen sich bei der Lasermaterialbearbeitung mit Industrierobotern deutlich höhere Geschwindigkeiten erzielen, ohne dass Abstriche bei der Genauigkeit hingenommen werden müssten. Die Projektergebnisse wurden auf nationalen und internationalen Fachmessen und Konferenzen präsentiert, unter anderem im Rahmen des International Symposium on Robotics ISR 2010 sowie auf der Hannover Messe 2011.