

Für die Robotikindustrie ist die Weiterentwicklung und industrienahe Umsetzung von Kraftregelfunktionen ein wichtiger Schritt zur Erschließung neuer Anwendungsgebiete. Insbesondere für robotergestützte Materialbearbeitungsprozesse wie Schleifen und Polieren ist diese Funktionalität unabdingbar. Das Projekt ForTeRob konnte eine Reihe technologischer Hemmnisse beseitigen, die bislang dem Einsatz der Kraftregelung im Bereich der Industrierobotik entgegenstanden.
Im Rahmen des Projekts wurde zum einen der innovative Kraftregelungsansatz FineForce implementiert, wissenschaftlich untersucht und in einem industrienahen Anwendungsszenario erprobt. FineForce erzielt durch den bevorzugten Einsatz der Handachsen eine besonders feinfühlige und agile Kraftführung, die sich beim Einsatz von reibungsarmen Handachsen sogar sensorlos realisieren lässt. Auch das häufig problematische Antasten von Werkstückoberflächen und der Übergang von der Bewegungs- zur Kraftregelung werden von FineForce stabil und zuverlässig gemeistert. Ferner wurden im Projekt Benchmark-Tests entwickelt, um die Kraftregelperformance von Industrierobotern systematisch bewerten und vergleichen zu können.
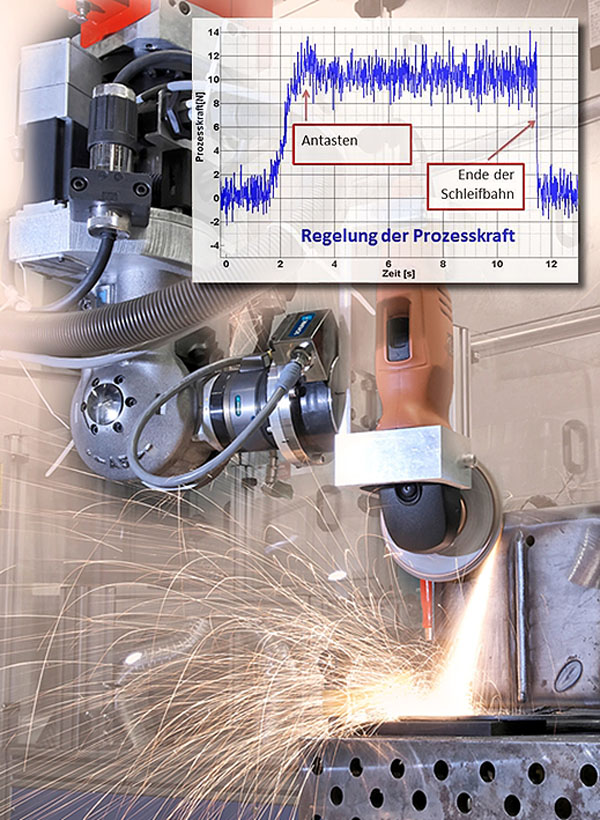
rechts: Kraftgeregeltes Schleifen mit FineForce (Quelle: Hochschule Aschaffenburg, Zentrum für Wissenschaftliche Services und Transfer (ZeWiS) )
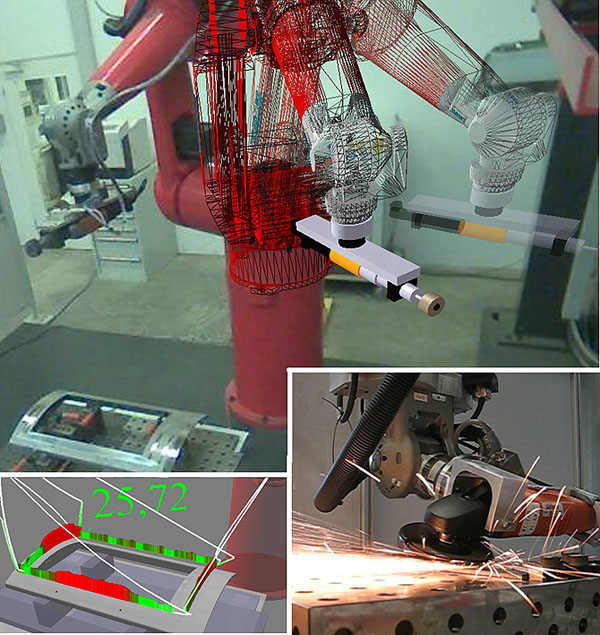
Zum anderen wurde im Projekt ForTeRob eine telematische Kontrollschnittstelle entwickelt, die es einem Experten mit den entsprechenden Programmier- und Prozesskenntnissen erlaubt, den Anwender bei der kraftsensitiven Werkstückbearbeitung zu unterstützen und roboterbasierte Fertigungsprozesse aus der Ferne zu überwachen und zu optimieren. Mit Hilfe von VR- und AR-Technologien wurden intuitive Einstellmöglichkeiten für die kraftsensitive Bearbeitung sowie Möglichkeiten zur automatischen Überwachung von Bearbeitungsparametern geschaffen. Dadurch wird die Komplexität für den Endanwender reduziert und die Technologie auch Betrieben ohne Programmierexperten zugänglich gemacht.
Das Projektkonsortium bestand aus den wissenschaftlichen Einrichtungen Hochschule Aschaffenburg und Julius-Maximilians-Universität Würzburg, dem Roboterhersteller Reis Robotics sowie der Fa. Metallbau Heidenau als exemplarischem Endanwender.