


Elektrische Antriebe müssen steigende Anforderungen hinsichtlich ihrer Sicherheit erfüllen. Um diese auch beim Ausfall einzelner Sensoren zu gewährleisten, sollen alternative Mess- oder Schätzwerte softwarebasiert zur Verfügung gestellt werden. Eine intelligente Steuerung soll Fehler frühzeitig erkennen und die Ansteuerung anpassen.
Im Zuge der fortschreitenden Elektrifizierung und Automatisierung werden immer häufiger elektrische Antriebssysteme eingesetzt. Antriebe übernehmen Funktionen zunehmend autonom oder teilautonom, womit die Haftung und die rechtliche Verantwortung zu deren Herstellern wandern. Ein Ausfall des zentralen elektrischen Traktionsantriebs hätte zum Beispiel fatale, eventuell lebensbedrohliche Folgen für mehrere Verkehrsteilnehmer.
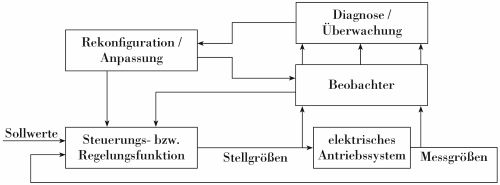
Das allgemeine Ziel des Projekts ist es daher, die Zuverlässigkeit von elektrischen Antrieben zu steigern, vor allem indem der Ausfall einzelner Sensoren vermieden wird. Wenn einzelne Sensoren ausfallen, führt dies zum direkten Versagen der Motorregelung. Daher muss die Sensorik elektrischer Antriebssysteme bei sicherheitskritischen Anwendungen eine besonders hohe Ausfallsicherheit bieten. Für diesen Fall werden alternative Mess- oder Schätzwerte benötigt, auf die im Fehlerfall durch eine intelligente, rekonfigurierbare Motorsteuerung zurückgegriffen werden kann. Mit deren Hilfe ist dann ein Weiterbetrieb oder eventuell auch ein Notbetrieb bei geringer Leistung möglich.
Der konventionelle Ansatz ist es, entweder die Anzahl an physischen Sensoren zu erhöhen oder redundante, zweikanalige Sensoren mit höherer Ausfallsicherheit einzusetzen. Nachteile bei diesem Lösungsansatz sind die erhöhten Systemkosten und gegebenenfalls ein erhöhter Bauraumbedarf. Das Neuartige am Forschungsvorhaben besteht darin, die notwendigen, alternativen Sensorsignale durch softwarebasierte Schätzverfahren – sogenannte sensorlose Verfahren – zur Verfügung zu stellen. Dies hat den Vorteil, dass es zu keiner Erhöhung der Systemkosten durch den erhöhten Sensorikbedarf kommt.
