

Ein extremer Mangel an Fachpersonal stellt Krankenhäuser weltweit vor große Herausforderungen. Auch in der chirurgischen Krankenversorgung führt diese Problematik zu einer immer höheren Belastung des bestehenden Personals und gefährdet die adäquate und rechtzeitige Behandlung von Patienten. Um das hohe Niveau der Gesundheitsversorgung aufrechterhalten, sind neue innovative Lösungen dringend erforderlich.
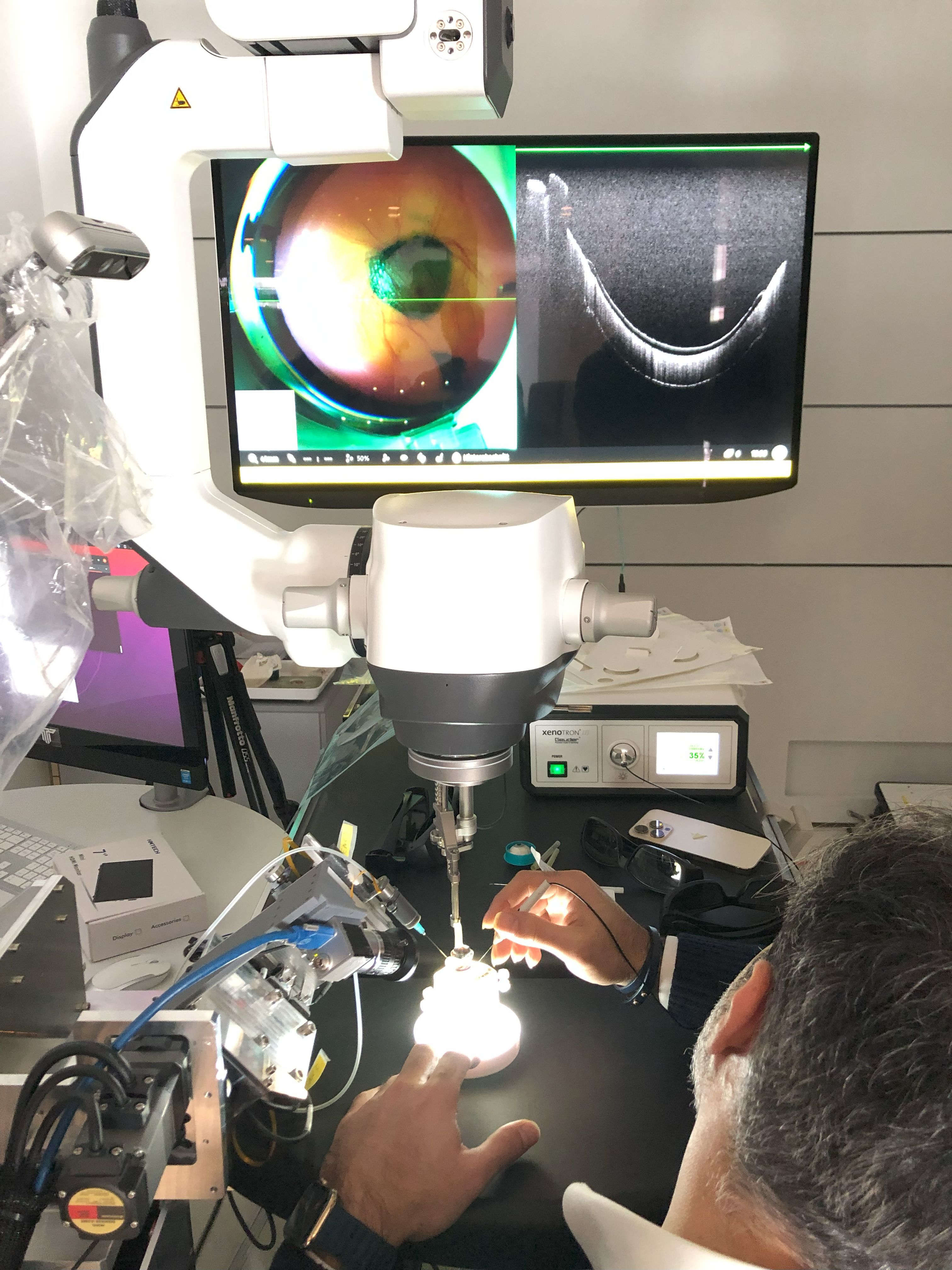
Um dieser Problematik zu begegnen, wurde im Rahmen des Forschungsprojekts AURORA ein mobiler Assistenzroboter für den OP-Saal entwickelt, der das chirurgische Team während der Durchführung von Operationen unterstützen soll. Ziel ist die Übernahme von monotonen oder unergonomischen Arbeiten im nichtsterilen Bereich des OP-Saals. Im Projektverlauf wurde dies anhand von zwei Anwendungsfällen modellhaft realisiert: Der AURORA-Roboter holt Sterilgut aus dem Lager, öffnet dieses und reicht es dem OP-Team an, sodass der Inhalt steril entnommen werden kann. Zudem bedient der Roboter intraoperativ benötigte Medizingeräte, indem er haptisch mit den Bedienelementen der Geräte interagiert.

Das Projekt wurde in einer interdisziplinären Kollaboration von akademischen und industriellen Partnern durchgeführt. Zu Beginn des Projekts erfolgte eine Anforderungsanalyse gemeinsam mit medizinischem Personal am Klinikum rechts der Isar der TU München. Nach einer Entwicklung der robotischen Teilkomponenten (mobile Plattform, Roboterarm mit Endeffektor, Navigationssystem, Nutzerschnittstellen etc.) wurden diese zu einem Gesamtsystem integriert, das im Rahmen einer Nutzerstudie mit OP-Personal evaluiert wurde.
Im Rahmen des Forschungsprojekts AURORA konnte erfolgreich gezeigt werden, dass ein mobiler Assistenzroboter Aufgaben im OP-Saal übernehmen und dabei die Anforderungen dieser besonderen Umgebung erfüllen kann. Das sehr positive Feedback der Studienteilnehmerinnen und -teilnehmer bestätigte die hohe Relevanz des Projekts sowie die Leistungsfähigkeit des entwickelten Demonstrators.