

Um die Einsatzfähigkeit von kollaborativen Robotern im Zusammenspiel mit dem Menschen zu erhöhen, ist es entscheidend, die Arbeitsgeschwindigkeit des Roboters zu steigern ─ bei gleichzeitiger Einhaltung der normativen Vorgaben. Dafür wäre es ideal, wenn der Roboter mögliche Kollisionen mit dem Menschen bereits vor dem Kontakt detektiert, sodass der Roboter sicher anhält und es zu keiner oder nur zu einer möglichst geringen biomechanischen Belastung des Menschen kommt.
Ziel des Projekts KapSens4MRK war die Integration kapazitiver Sensorik in einen kollaborativen Roboter, durch die die Arbeitsgeschwindigkeit des Roboters sicher gesteigert werden soll, aber der Mensch gleichzeitig nach geltenden normativen Bedingungen abgesichert wird.
Durch die berührungslose Detektion im nahen Umfeld kann eine Kollision des Roboters mit einem Menschen generell vermieden werden. Daher wurden in diesem Projekt kapazitive Sensoren an einen Roboter angebracht und strukturiert Messreihen durchgeführt, um das Verhalten des Roboters im Zusammenspiel mit dem Einsatz der Sensoren zu untersuchen.
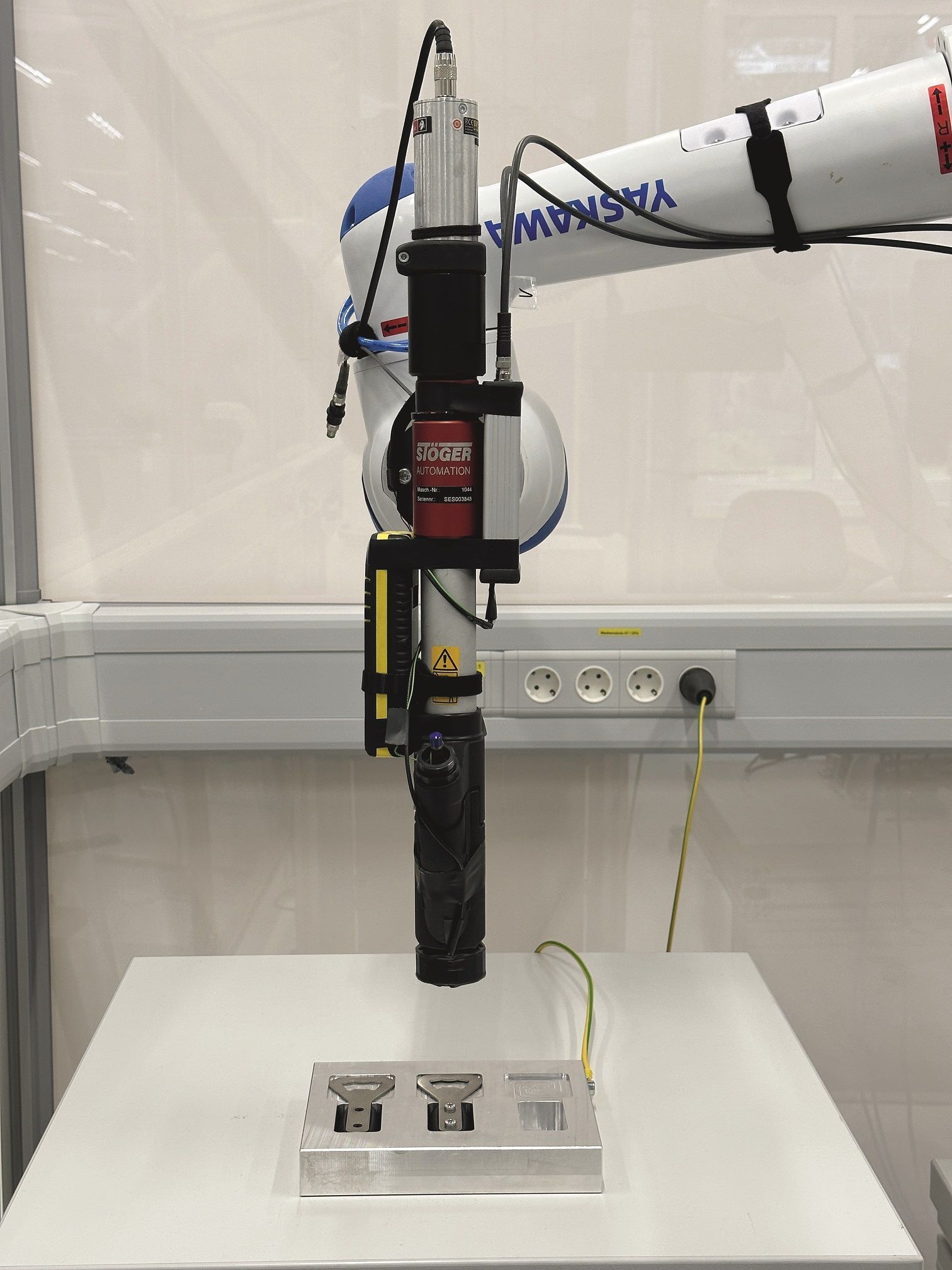
Als Anwendungsfall wurde eine Schraubapplikation mit einem automatischen Schraubwerkzeug ausgewählt.
Zusammenfassend lässt sich feststellen, dass durch die strukturierte Durchführung der Messreihen anhand der Versuchsaufbauten die robuste Funktionsweise der kapazitiven Sensorik nachgewiesen werden konnte. Durch die positiven Ergebnisse, insbesondere bei der Evaluation der Krafteinwirkung, konnte auch der Nutzen des Einsatzes dieser Sensorik aufgezeigt werden. Mit den Sensoren kann die Arbeitsgeschwindigkeit des Roboters in einem Produktionsprozess erhöht und der Nahbereich sicherer gestaltet werden, sodass auch sicherheitstechnisch grenzwertige Auslegungen entschärft werden können.