

Ziel dieses Forschungsprojekts war die Durchführung einer Technologiestudie zur automatisierten Gewichtserfassung von Bauteilen während eines Handlingsprozesses.
Ein wichtiger Prozessparameter bei der Fertigung von Pressen zur Herstellung von Metall-Sinterbauteilen ist die genaue Einhaltung des Gewichts des Presslings. Vor Projektbeginn wurde das Bauteil durch eine Linearachse als Entnahmevorrichtung entnommen und auf einer Waage auf sein Gewicht geprüft. Da die Pressen bis zu 20 Presslinge pro Minute herstellen können, ist der Wiegevorgang ein zeitlicher Engpass in der Fertigung.
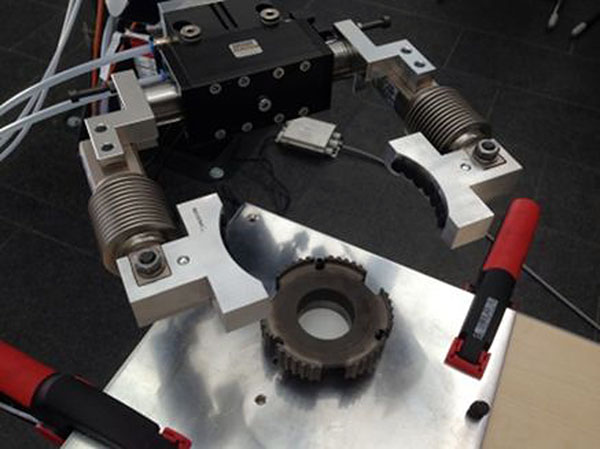
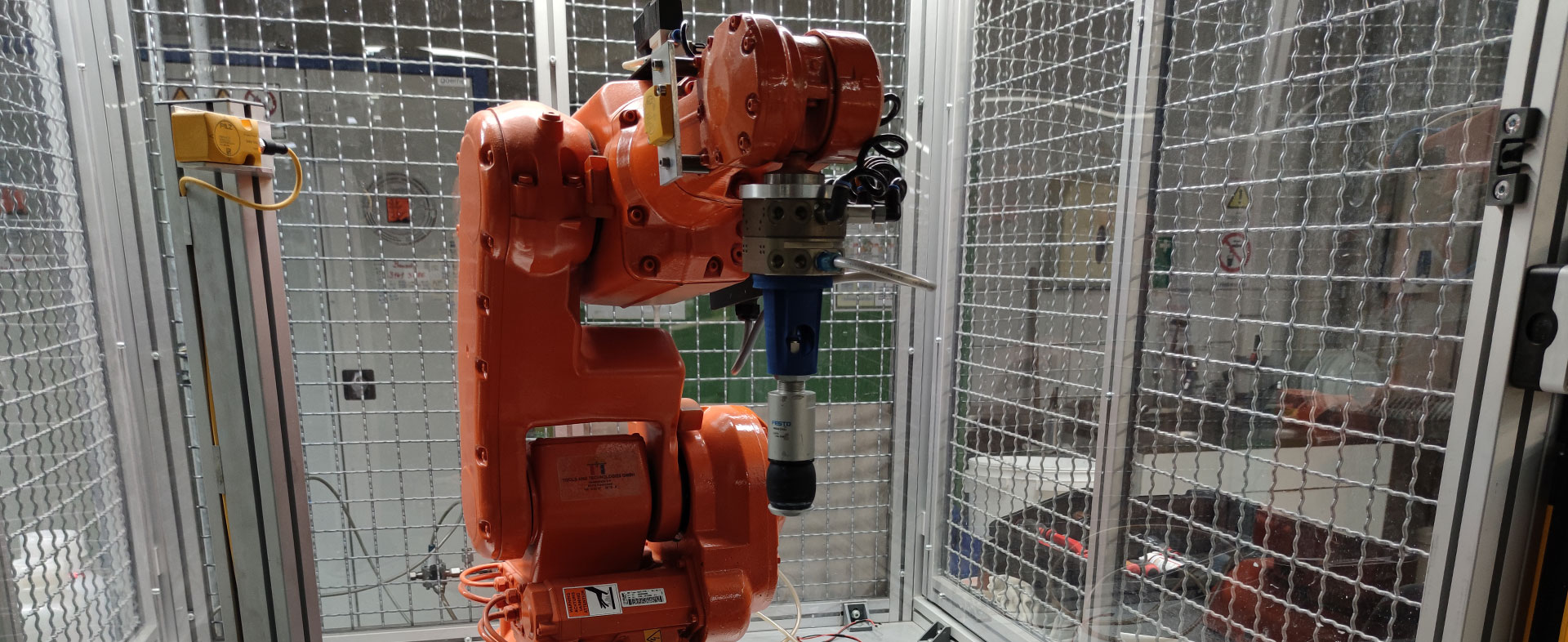
rechts: (Quelle: Technologie Campus Cham, Fakultät Naturwissenschaften und Wirtschaftsingenieurwesen)
Im Rahmen des Projekts sollte eine automatisierte Gewichtserfassung während des Prozesses mit Hilfe des Roboters entwickelt werden. Die Prozessfähigkeit sollte dabei 6 sigma erreichen. Dieses neue Verfahren kann zur Verschlankung und zur Stabilität des aktuellen Prozesses erheblich beitragen. Das Projekt wurde in fünf Arbeitspakete unterteilt: AP1: Messmittelfähigkeitsuntersuchung am vorhandenen Greifer; AP2: Versuche mit vorhandenen Greifern; AP3: Evaluierung anderer Techniken (Greifer/Messtechnik); AP4: Erprobung anderer Techniken (System, Greifer + Messtechnik); AP5: Verifikation einer ausgewählten Messtechnik unter Verwendung der statistischen Versuchsplanung.
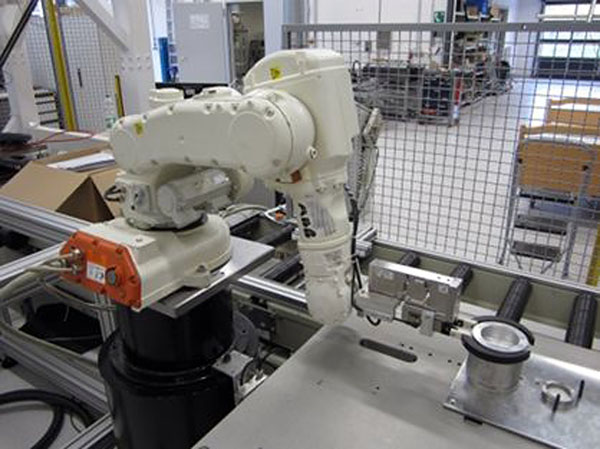
Durch das Projekt konnte nachgewiesen werden, dass es grundsätzlich möglich ist, während eines Handlingvorgangs mit einem Industrieroboter Bauteile auf ihr Gewicht zu überprüfen. Für die bayerische Industrie bieten sich hierdurch zahlreiche Praxisanwendungen, die sich nicht nur auf den Bereich des Bauteilhandlings von Pressteilen beschränken. Während des Projekts hat sich gezeigt, dass eine Vielzahl von Einflussfaktoren auf das Messergebnis einwirkt. Als einer der größten Einflussfaktoren stellten sich Schwingungen infolge der Bewegung sowie durch den Roboter heraus.