


Das zunehmend komplexere technische Umfeld im chirurgischen OP-Saal erfordert innovative Unterstützungssysteme, die das OP-Team durch die (teil-)autonome Ausführung von bestimmten Tätigkeiten entlasten. Ziel des Forschungsprojekts war es, die Kameraführung während laparoskopischer Eingriffe selbstständig durch ein mechatronisches Assistenzsystem steuern zu lassen.
Alle bisher bekannten Kameraführungssysteme müssen durch den Operateur gesteuert werden und erhöhen somit zusätzlich die mentale Belastung. Für die automatische Kameranachführung wurde daher die Blickanalyse („Eyetracking“), kombiniert mit anderen Verfahren (z. B. Erfassung von Farbcodes an den Instrumenten), als methodischer Ansatz bestimmt. Diese anspruchsvolle Aufgabe konnte in der Projektlaufzeit erfolgreich gelöst werden. Bereits zu Beginn der Förderphase konnte nachgewiesen werden, dass das Prinzip des „Eyetracking“ allen konkurrierenden technischen Ansätzen überlegen war. Die Funktionalität wurde auf der Basis kontinuierlicher experimenteller Evaluation optimiert. Falsch-positive bzw. falsch-negative Kamerakorrekturen kamen deutlich weniger häufig als bei der durchschnittlichen manuellen Kameranachführung vor. Die außerordentlich befriedigenden Ergebnisse mit der Eyetracking-Kameranachführung erleichterten die Integration einer farbmarkerbasierten Instrumentenerkennung als zusätzliche „Back-up“-Lösung ganz erheblich. Die sogenannte „Konfliktanalyse“ und die Kompensation von widersprüchlichen Steuerkommandos gestalteten sich in praxi wesentlich weniger problematisch als ursprünglich angenommen.
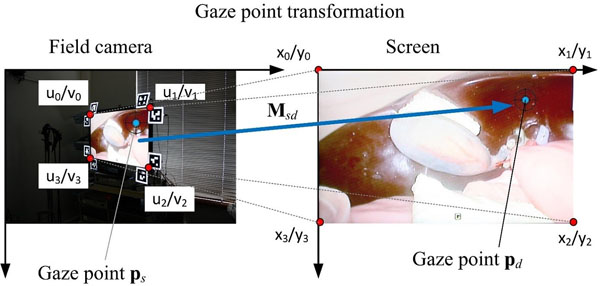
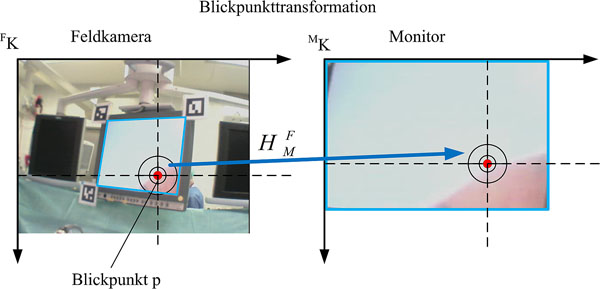
rechts: Versuchsaufbau: Genauigkeit der Blickpunktbestimmung bei verschiedenen Betrachtungswinkeln zu überprüfen mit resultierenden Winkelabweichungen von max. 1,3° (Tab.: Ergebnisse Blickpunktbestimmung) (Quelle: TUM, Klinik r.d. Isar, Forschungsgruppe MITI)
Ebenso erfolgreich konnte inzwischen eine optimierte Version des Kameraführungssystems realisiert werden. Neben vielen anderen Verbesserungen ist es für das Projekt „Soloassist – kognitiv“ von großer Bedeutung, dass die Kameraführung jederzeit verzögerungsfrei manuell direkt am Aktoram übersteuert werden kann. Auf diese Weise wird die Steuerung in der Z-Achse erheblich erleichtert, die intuitiv durch Annäherung des Kopfes bewirkt werden kann. Über die im Projektantrag beschriebenen Forschungs- und Entwicklungsziele hinausgehend wurden die Eyetracking-Daten dazu genutzt, um den OP-Monitor während des Eingriffs kontinuierlich so auszurichten, dass der Blick des Betrachters stets orthograd auf den Bildschirm trifft. Auch die dafür erforderliche Hardware (steuerbare Monitoraufhängung) wurde realisiert.
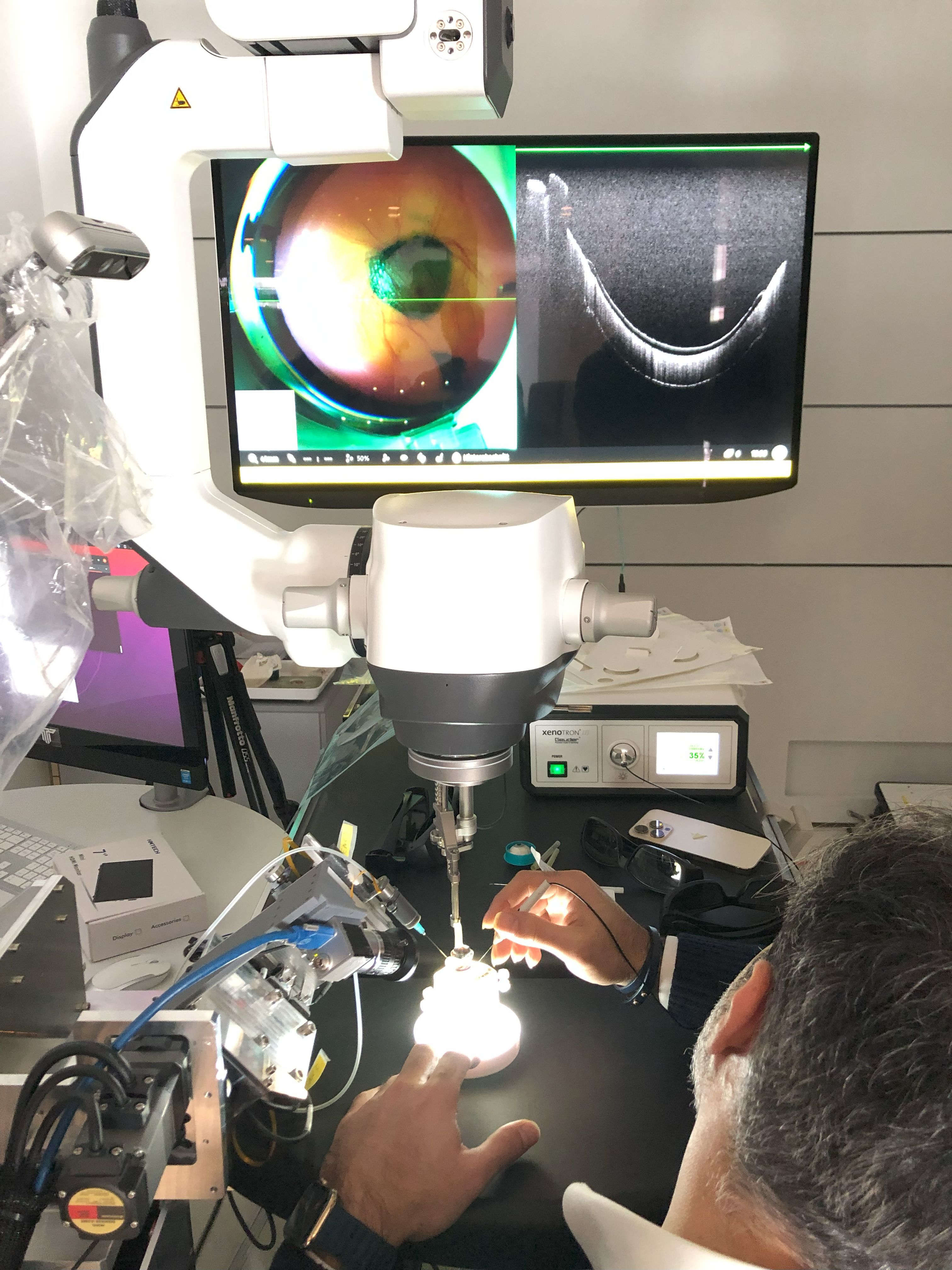
Das Gesamtsystem wurde bereits bei mehreren Fachveranstaltungen, u. a. auch beim Zukunftsrat der Bayerischen Wirtschaft im MOC 2015, demonstriert und fand außergewöhnliche Beachtung (Abb.). Die Überführung in den klinischen Einsatz ist in der kommenden Zeit geplant.