


Die heutige Produktion muss flexibel auf Änderungen reagieren können. Mobile Roboter, ein Zusammenschluss aus einem fahrerlosen Transportsystem und einem kollaborativen Roboter, der mit Menschen in einem Arbeitsraum arbeiten kann, haben prinzipiell das Potenzial, für eine flexible Produktion eingesetzt zu werden.
Der Forschungsverbund FORobotics beschäftigte sich mit der Fragestellung, wie diese Roboter alleine oder als Team – bestehend aus mehreren Robotern oder Mensch und Roboter – in der Produktion zielführend eingesetzt werden können. Die Zielstellungen des Verbundes umfassten dabei unter anderem die Bahnplanung und Navigation des Roboters, die aufgabenorientierte Planung und die Umfelderkennung sowie damit verbunden die Absicherung des mobilen Roboters zur sicheren Zusammenarbeit zwischen Mensch und Roboter. Damit Mensch und Roboter miteinander arbeiten können, ohne dass der Mensch dazu über Expertenkenntnisse für das Robotersystem verfügen muss, wurde außerdem die Mensch-Roboter-Interaktion untersucht.
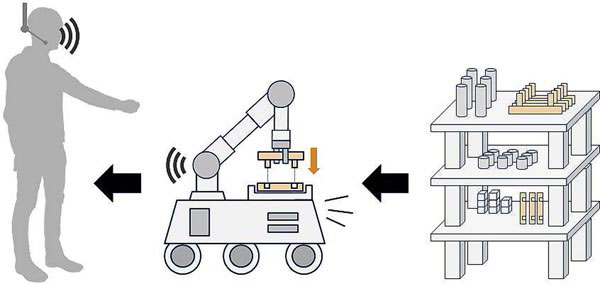

rechts: Kooperierende Roboter (Quelle Fraunhofer IGCV)
So stand am Ende des Projekts ein Dialogsystem zur Verfügung, über das der Mensch mit Hilfe von Gesten, Sprache oder einem Tablet mit dem Roboter interagieren kann. Auch die Akzeptanz der Werkskräfte gegenüber dem Robotersystem wurde in einem Arbeitspaket behandelt. Dazu wurden verschiedene Nutzerstudien durchgeführt, z. B. zu von Menschen ausgeführten Gesten und der notwendigen Breite von Lagergängen. Um die industrielle Einsetzbarkeit des Systems zu evaluieren und dadurch Erkenntnisse zu weiterführenden Entwicklungs- und Forschungsarbeiten ableiten zu können, wurde der mobile Roboter vier Wochen lang bei einem der Anwendungspartner in der Kommissionierung eingesetzt, wobei in einer Art Tagebuch die Erkenntnisse dokumentiert wurden.